
Automatische Positionierung
Das beschriebene System positioniert automatisch während der Montage, wobei die folgenden Bedingungen überwacht werden:
- Die Türunterseite muss parallel zum Chassis des Fahrzeugs sein
- Der Spalt oberhalb und unterhalb der Tür muss gleich groß sein
- Der Abstand der Tür zur mittleren Säule muss in der Höhe des Schlosses einen vorgegebenen Wert haben
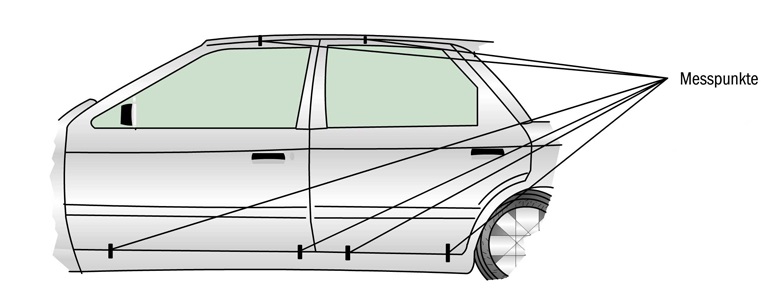
Die nebenstehende Skizze zeigt die Lage der Messpunkte an den vorderen und hinteren Türen des Fahrzeugs
Tatsächlich ist das Messproblem identisch mit dem bei der Spaltvermessung. Vier OPTIscan / OPTImess 2D Sensoren sind an einem Rahmen befestigt, den ein Roboter zum Greifen der Türen benutzt (siehe Skizze rechts).

Nachfolgende Parameter können einfach bestimmt werden:
- Der Drehwinkel, um welchen der Roboterarm geschwenkt werden muss, um die Unterseite der Tür parallel zum Chassis auszurichten.
- Die vertikale Bewegung, die der Roboter ausführen muss, um den oberen und unteren Türspalt gleich groß zu machen.
- Die horizontale Bewegung, die der Roboterarm ausführen muss, damit der Abstand Tür - Säule in Höhe des Schlosses den vorgegebenen Wert hat.
In der Praxis, wo ein Roboter je Tür eingesetzt wird, werden vier Roboter pro Fahrzeug benötigt. Wir sind der Meinung, dass die beste Lösung - technisch und wirtschaftlich - der Einsatz von zwei Sensorgruppen (1 Gruppe für jede Seite) ist. Jede Gruppe besteht aus folgenden Baugruppen:
- 8 oder 9 OPTIscan / OPTImess 2D Sensoren (9 für den Fall, dass in einer Fertigungslinie sowohl 4-türige und 2-türige Typen des gleichen Fahrzeuges gefertigt werden, da 2-türige Fahrzeuge größere Fronttüren als 4-türige haben, wofür ein weiterer OPTIscan / OPTImess 2D benötigt wird).
- 1 digitale Verarbeitungseinheit mit einer Kommunikationseinheit für die Robotersteuerung.
Es ist zu bemerken, dass dieses System auch in der Lage ist, die richtige Einbautiefe der Tür sicherzustellen (Position der Oberfläche der Tür relativ zur Oberfläche der restlichen Karosserie).
Für jeden der OPTIscan / OPTImess 2D Sensoren sehen die Differenzen zwischen den Türkanten und der Karosserie wie folgt aus: