
Fahrzeugkompensation
Das berührungslose Fahrdrahtlagemesssystem OVHWizard erfasst die Höhen- und Seitenlage des Fahrdrahtes bezogen auf den Montageort des Messsystems. Dieser liegt im Allgemeinen 3-4 m oberhalb der Schienenoberkante auf dem Dach des Fahrzeugs oder an einem Halter in entsprechender Höhe.
Die Bewegungen des Fahrzeugs im Gleis während der Fahrt beeinflussen so die Messwerte je nach Federung mehr oder weniger stark. Um diesen Einfluss zu kompensieren, werden die Fahrzeugbewegungen in horizontaler Richtung (Spurspiel), in vertikaler Richtung (Einfederung) und das Rollen des Fahrzeuges (Drehung des Aufbaues um die die Fahrzeugdrehachse) entweder mittels 5 Ultraschallsensoren oder 2 Laserlichtschnittsensoren kompensiert. Welches System zum Einsatz kommt, hängt von dem konstruktiven Aufbau des Fahrzeugs ab. Beide Systeme erzeugen so Kompensationsdaten, die direkt an das Fahrdrahtlagemesssystem OVHWizard weitergeleitet werden. Im OVHWizard werden die aktuellen Messwerte online mit den Kompensationsdaten korrigiert.
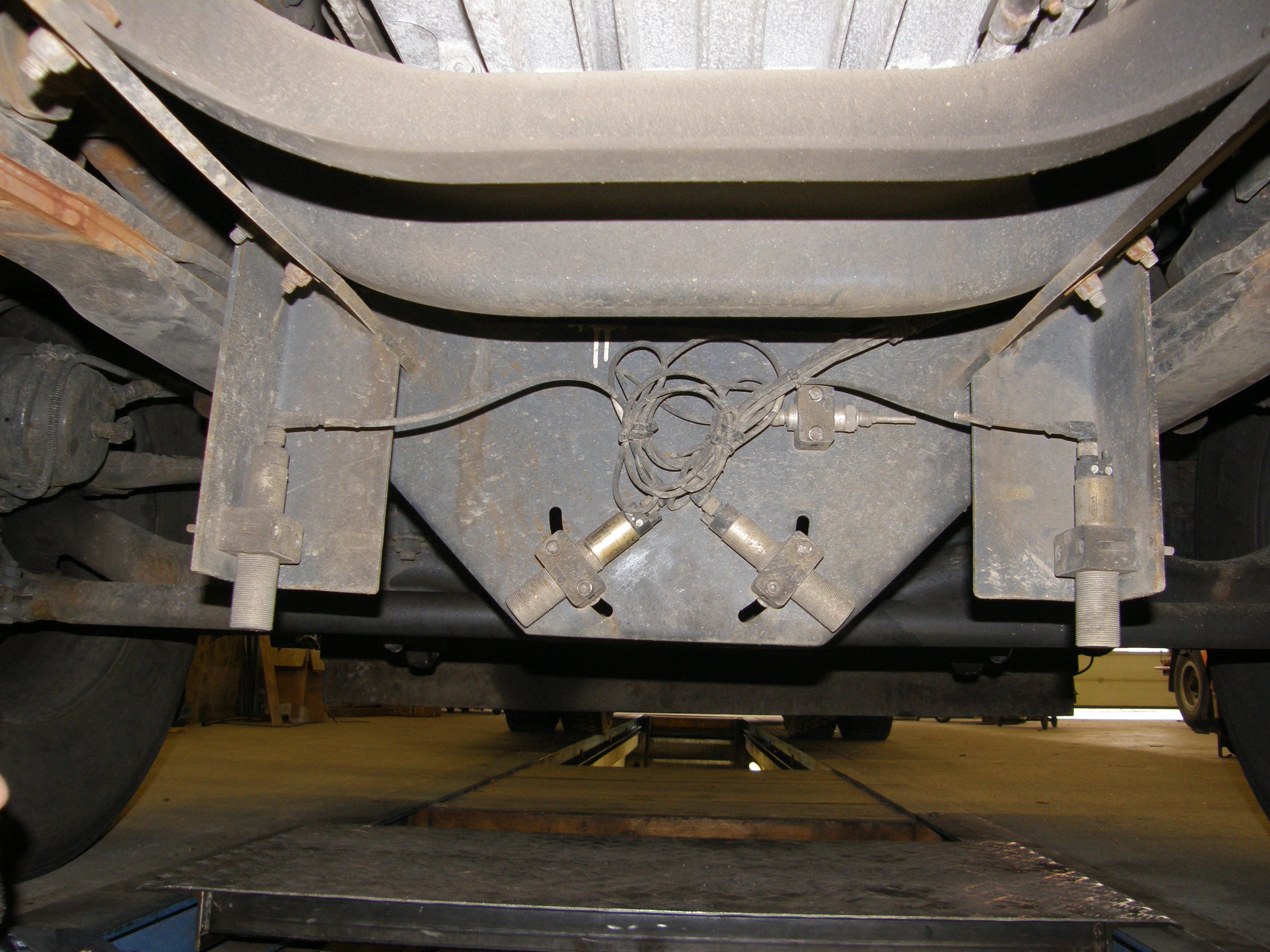
Die Kompensationseinheit wird als kompakte Einheit in einem kleinen Schaltschrank der Schutzklasse IP 69 K geliefert. Die Sensoren werden an einer Montageplatte unter dem Fahrzeug in Absprache mit dem Kunden montiert (Option). Der genaue Einbauort ist zusammen mit dem Fahrzeughersteller oder -betreiber festzulegen und in einer Simulation ist zu prüfen, dass die Sensoren unter allen Fahrbedingungen (z.B. unterschiedlichen Kurvenradien) die Schienenkante erfassen.
Ultraschallkompensation
Bei den 5 Ultraschallsensoren erfassen zwei Sensoren die horizontale Bewegung im Gleis, zwei weitere Sensoren die Einfederung und die Rollbewegung des Fahrzeugs. Der fünfte Sensor dient zur Kompensation der Temperaturabhängigkeit der Ultraschallmessung.

Laserkompensation
Die zwei Laserlichtschnittsensoren erfassen das komplette Schienenprofil bis über den Fahrspiegel.
Bei einer Bewegung des Fahrzeugs im Gleis verschiebt oder verdreht sich auch die Lage der Schiene gegenüber dem Sensor. Aus dieser Lageveränderung ermittelt die Software die drei Fahrzeugbewegungen Seiten- und Höhenlage, sowie Rollen des Fahrzeugs.